View the video on Youtube

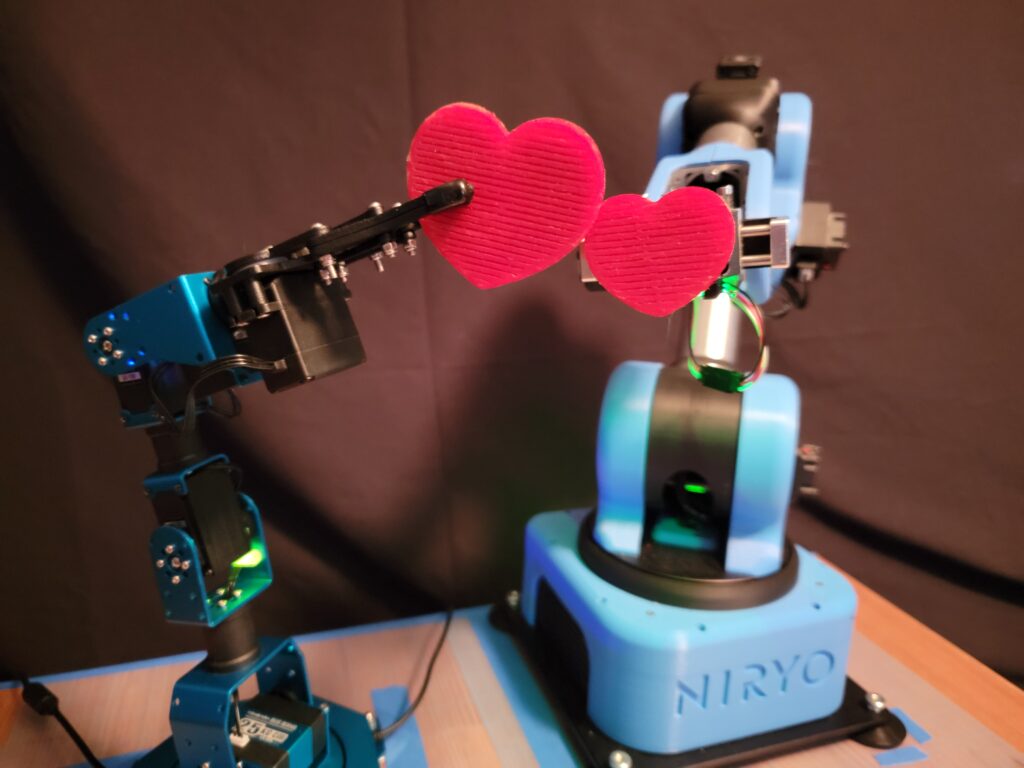
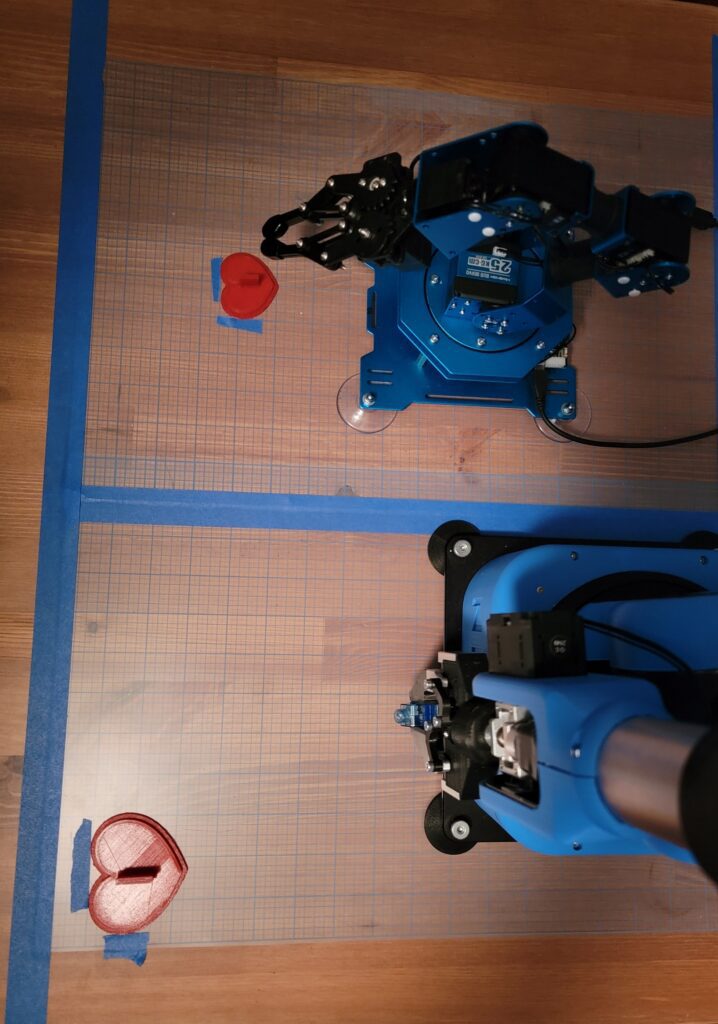
Ned has a new friend! The HiWonder Xarm is a fun little educational robot which you can buy assembled or in a kit. We thought it would be fun to see if the Xarm is repeatable enough to perform in a video alongside our Niryo Ned. It did very well for the price; at one stage, I needed to reteach some points that “wandered” for some reason but other than that it’s a great little robot. Note, the Xarm is really more of a 5-axis than 6-axis robot; the 6th axis is the gripper jaws, which does limit some of the positioning but Ned was able to work around this.
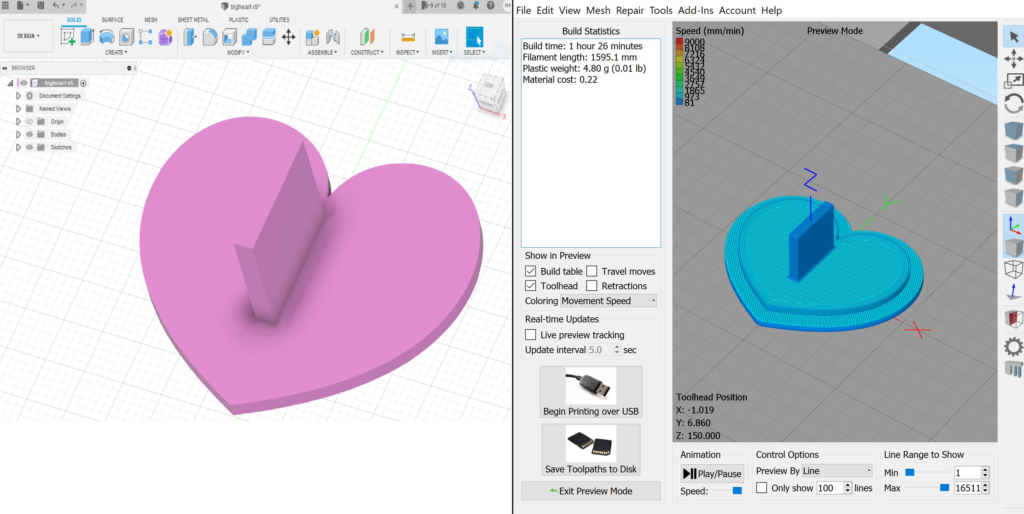
For props, I designed a simple heart shape with a grip and printed it on our FlashForge Creator Pro. Resized for the smaller heart, repeat. Slicing done on Simplify3d.
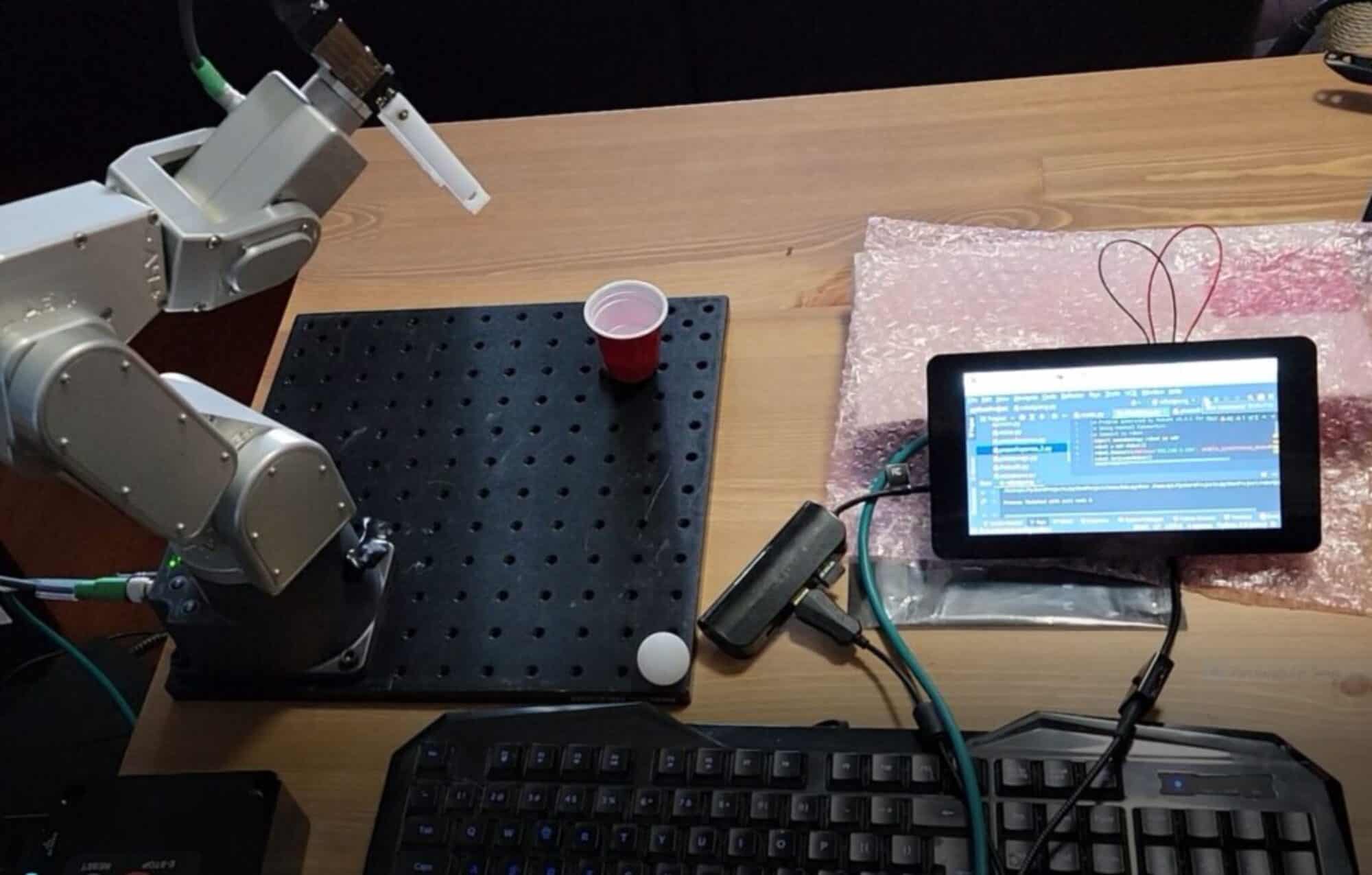
In any setup where pre-stage is the locating method, it’s important to know where your robots & parts are. I used a couple of plastic grids which are inexpensive and reusable; they’re sold as quilting accessories.
We repeated the exchanging-of-valentines action over two dozen times; occasionally it didn’t work out (there was some variability where Ned put down the small heart, and occasionally the pencil stuck in his gripper jaws), but overall I was really happy with the sequence. The video featured on RoboFiesta’s Youtube channel was shot on a Samsung Galaxy S21 Ultra 5G, which has awesome media production capabilities. Edited on Adobe’s Premier Pro.