The year has just flown by, and here we are in the Festive Season again. It made sense to do a skit with the robots helping Santa out by palletizing presents (which are then loaded to shipping containers which conveniently fit in Santa’s sled).
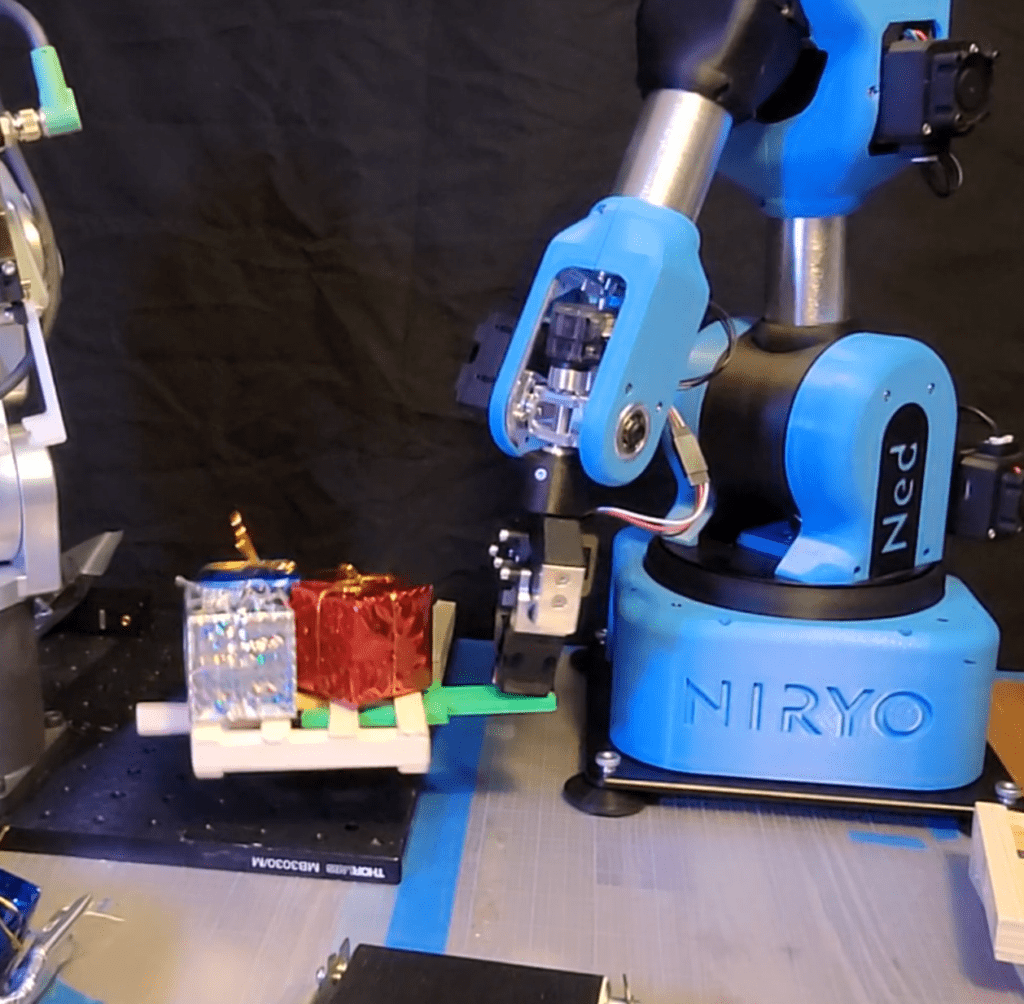
OK, so to be truthful I’ve been struggling with some Ned issues for the past few months. He won’t hold a calibration, or for some reason his positioning will shift from one run to the next. The Niryo website has some suggestions, notably updating the steppers:
Maybe that’s the thing to try next, when there’s some time. Anyway, after making a little pallet fork for him, the best I could do was have him statically hold the loaded pallet and pretend that it made it to the conveyor (using editing magic).
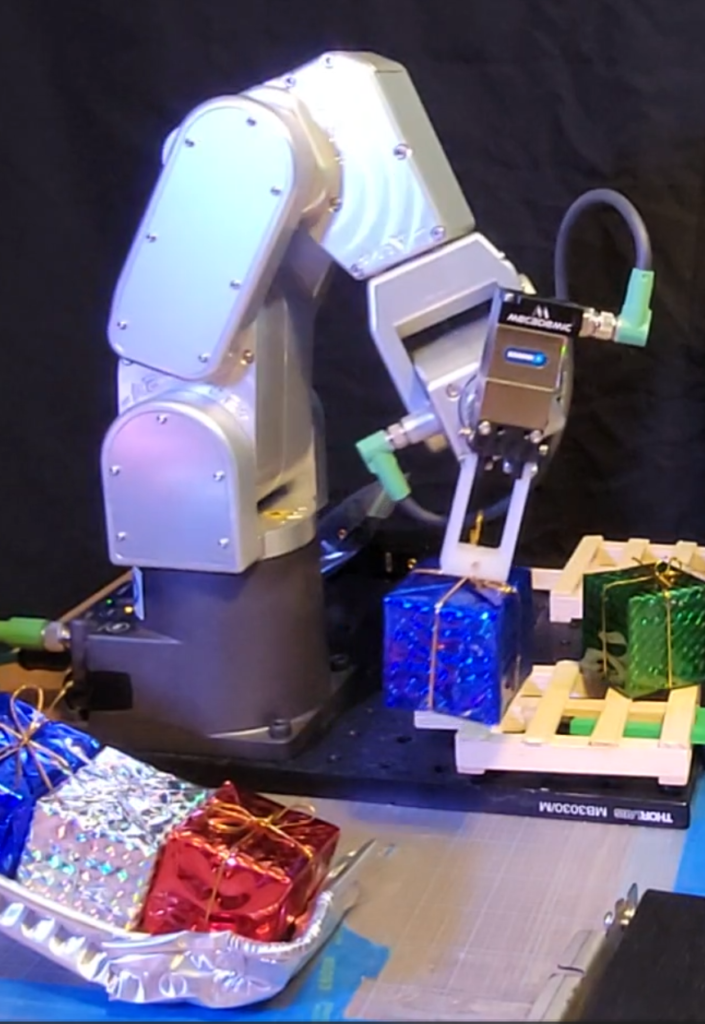
Meca Mike was a trooper, and if he had the right grippers could have also moved the pallet after loading it. The challenges for him included irregular placement of the present bows, and a makeshift present slide that didn’t position the boxes very repeatably. It took several attempts to get the pallet load shot.
Here’s the finished video, just a short clip to wish everyone Happy Holidays!